

Mécanique Générale 1 · Chapitre 3
Dynamique du Point Matériel
Des lois de Newton à la simulation numérique — comprendre le mouvement par ses causes

1. Introduction à la dynamique
Imaginez une bille lancée sur une table : elle ralentit progressivement. Pourquoi ne continue-t-elle pas indéfiniment ? Parce qu'une force de frottement agit. C'est précisément ce que la dynamique du point matériel nous permet de modéliser et de prévoir avec précision mathématique.
La dynamique classique repose sur les travaux d'Isaac Newton (1642–1727), publiés en 1687 dans son œuvre fondatrice Philosophiæ Naturalis Principia Mathematica. Newton réussit le tour de force d'unifier les lois de la mécanique terrestre (chute des corps) avec les lois de la mécanique céleste, ce qui transforma sa théorie en un véritable pilier de la physique pendant plus de deux siècles.
Dans ce chapitre, nous allons :
- Énoncer et interpréter les trois lois de Newton
- Appliquer le Principe Fondamental de la Dynamique (PFD) à des cas concrets
- Simuler des mouvements avec MATLAB et visualiser les résultats
- Relier forces, travail et énergie cinétique
2. Les trois lois de Newton
Les lois de Newton sont les fondements de toute la mécanique classique. Elles s'appliquent dans un référentiel galiléen (ou inertiel), c'est-à-dire un référentiel dans lequel un corps non soumis à des forces est en mouvement rectiligne uniforme, en pratique, le référentiel terrestre est souvent considéré comme galiléen pour les problèmes courants.
2.1 Première loi : Principe d'inertie
Concrètement : si la somme vectorielle des forces appliquées est nulle, le vecteur vitesse ne change pas — ni en norme, ni en direction. C'est la raison pour laquelle un astronaute lâche un objet dans l'espace et celui-ci continue en ligne droite indéfiniment.
2.2 Deuxième loi : Principe Fondamental de la Dynamique
Cette loi est vectorielle : elle s'applique composante par composante. La masse m mesure l'inertie du point : plus elle est grande, plus il est difficile de modifier son vecteur vitesse. C'est pourquoi un camion est bien plus difficile à arrêter qu'une bicyclette, même à la même vitesse.
2.3 Troisième loi : Principe des actions réciproques
Attention : ces deux forces s'appliquent sur des corps différents — elles ne se compensent donc jamais. C'est une confusion classique au début des études !
3. Application du PFD : méthode de résolution
Pour appliquer correctement le PFD, il faut suivre une démarche rigoureuse en cinq étapes :
- Choisir le système étudié et le référentiel galiléen adapté.
- Inventaire des forces : lister toutes les forces et les représenter.
- Projeter le PFD sur les axes du repère choisi.
- Intégrer les équations du mouvement avec les conditions initiales.
- Interpréter les résultats physiquement.
4. Quantité de mouvement et impulsion
4.1 La quantité de mouvement
La quantité de mouvement d'un point matériel est définie par :
Elle s'exprime en kg·m/s et est un vecteur. Le PFD peut se réécrire de façon plus générale :
Cette forme reste valide même si la masse varie (cas des fusées). La conservation de la quantité de mouvement explique le recul d'un canon, la propulsion des fusées et des avions à réaction.
4.2 Conservation de la quantité de mouvement
| Grandeur | Symbole | Unité SI | Nature |
|---|---|---|---|
| Quantité de mouvement | p⃗ = mv⃗ | kg·m/s | Vecteur |
| Impulsion d'une force | J⃗ = F⃗·Δt | N·s = kg·m/s | Vecteur |
| Force résultante | ∑ F⃗ | Newton (N) | Vecteur |
| Accélération | a⃗ = dv⃗/dt | m/s² | Vecteur |
5. Exemples résolus
5.1 Chute libre verticale
Problème : Un objet de masse m = 2 kg est lâché sans vitesse initiale depuis une hauteur h = 20 m. Calculer son accélération, sa vitesse à l'impact et la durée de la chute. (Air négligé.)
Bilan des forces : une seule force — le poids P⃗ = mg⃗ (vers le bas).
Application du PFD sur l'axe y ↓ :
Intégration (conditions initiales v₀ = 0, y₀ = 0) :
Durée : h = ½·g·t² → t = √(2h/g) = √(40/9,81) ≈ 2,02 s
Vitesse à l'impact : v = g·t ≈ 9,81 × 2,02 ≈ 19,8 m/s ✔ La masse n'intervient pas.
5.2 Objet sur un plan incliné avec frottement
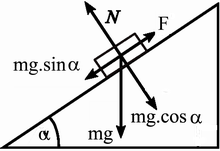
Problème : Un bloc de masse m = 5 kg glisse sur un plan incliné à θ = 30° avec μ = 0,2. Calculer l'accélération.
Projection du PFD :
✔ Sans frottement : a = g·sin30° = 4,9 m/s². Le frottement réduit donc l'accélération de 35 %.
6. Mouvement du projectile — Simulation MATLAB
Le mouvement parabolique est l'application la plus classique du PFD. Un projectile lancé avec une vitesse initiale v₀ selon un angle α décrit une trajectoire parabolique, car la composante horizontale est uniforme et la composante verticale est uniformément accélérée.

6.1 Mise en équations
6.2 Code MATLAB — Comparaison multi-angles
% ===================================================== % Dynamique du Point Matériel — Mouvement Parabolique % Comparaison multi-angles — Mécanique Générale 1 % ===================================================== clear all; clc; g = 9.81; v0 = 20; angles = [15, 30, 45, 60, 75]; couleurs = {'#e74c3c','#e67e22','#2ecc71','#3498db','#9b59b6'}; figure(1); hold on; grid on; title('Trajectoires paraboliques — Différents angles'); xlabel('Distance x (m)'); ylabel('Hauteur y (m)'); for k = 1:length(angles) alpha = deg2rad(angles(k)); T = 2 * v0 * sin(alpha) / g; t = linspace(0, T, 200); x = v0 .* cos(alpha) .* t; y = v0 .* sin(alpha) .* t - 0.5*g.*t.^2; R = v0^2 * sin(2*alpha) / g; H = (v0*sin(alpha))^2 / (2*g); plot(x, y, 'Color', couleurs{k}, 'LineWidth', 2); fprintf('α=%2d° → R=%.2f m, H=%.2f m\n', angles(k), R, H); end legend(arrayfun(@(a) sprintf('α=%d°',a), angles, 'UniformOutput', false)); ylim([0, inf]); hold off;
Fig. 4 — Trajectoires paraboliques simulées (v₀ = 20 m/s). L'angle 45° maximise la portée horizontale.
Résultats numériques pour v₀ = 20 m/s :
| Angle α | Portée R (m) | Hauteur max H (m) | Durée T (s) |
|---|---|---|---|
| 15° | 20,41 | 1,37 | 1,05 |
| 30° | 35,35 | 5,10 | 2,04 |
| 45° | 40,77 | 10,19 | 2,89 |
| 60° | 35,35 | 15,29 | 3,53 |
| 75° | 20,41 | 19,01 | 3,93 |
7. Énergie cinétique et théorème travail-énergie
7.1 Énergie cinétique
Elle s'exprime en Joules (J) et est toujours positive ou nulle. C'est une grandeur scalaire.
7.2 Travail d'une force
Si θ = 90° (force perpendiculaire au déplacement), le travail est nul — c'est le cas de la réaction normale d'un plan.
7.3 Théorème travail-énergie cinétique
Ce théorème est très puissant : il permet de trouver la vitesse en un point sans intégrer les équations du mouvement, dès lors qu'on peut calculer les travaux des forces.
8. Application avancée : oscillateur amorti — MATLAB + ode45
L'oscillateur amorti (masse-ressort-amortisseur) est un modèle fondamental avec des applications en génie civil, mécanique automobile, électronique, sismologie… Son équation du mouvement est issue directement du PFD :
8.1 Trois régimes possibles
- ξ < 1 — Régime sous-amorti : oscillations dont l'amplitude décroît exponentiellement.
- ξ = 1 — Régime critique : retour à l'équilibre le plus rapide sans oscillation (suspension optimale).
- ξ > 1 — Régime sur-amorti : retour lent sans oscillation.
8.2 Code MATLAB avec ode45
% ===================================================== % Oscillateur amorti — Résolution numérique ode45 % Comparaison sous-amorti / critique / sur-amorti % Mécanique Générale 1 — Chapitre 3 % ===================================================== clear all; clc; m = 1; k = 4; xi_vals = [0.2, 1.0, 2.0]; labels = {'Sous-amorti (ξ=0.2)', 'Critique (ξ=1)', 'Sur-amorti (ξ=2)'}; colors = {'b', 'r', 'g'}; CI = [1; 0]; % x0=1m, v0=0 tspan = [0, 10]; figure(1); hold on; grid on; title('Oscillateur amorti — Comparaison des régimes'); xlabel('Temps t (s)'); ylabel('Déplacement x (m)'); for i = 1:length(xi_vals) d = 2 * xi_vals(i) * sqrt(k*m); osc = @(t,Y) [Y(2); -(d/m)*Y(2) - (k/m)*Y(1)]; [t,Y] = ode45(osc, tspan, CI); plot(t, Y(:,1), colors{i}, 'LineWidth', 2); end legend(labels); hold off;
Fig. 5 — Réponse libre de l'oscillateur amorti : régime sous-amorti (oscillations décroissantes), critique (retour rapide), sur-amorti (retour lent).
ode45 implémente la méthode de Runge-Kutta d'ordre 4/5 à pas adaptatif — idéale pour les systèmes différentiels issus du PFD. Pour les systèmes raides (forte raideur), préférez ode15s.
✅ Ce qu'il faut absolument retenir
La dynamique du point matériel repose sur un socle conceptuel solide :
- Les trois lois de Newton s'appliquent exclusivement dans un référentiel galiléen.
- La méthode PFD : système → référentiel → forces → projection → intégration.
- La quantité de mouvement p⃗ = mv⃗ est conservée quand ∑F⃗ = 0⃗.
- Le théorème travail-énergie : ΔEc = W_total — alternative puissante à l'intégration directe.
- MATLAB + ode45 permettent de résoudre numériquement toute équation différentielle issue du PFD.
- L'angle 45° maximise la portée d'un projectile (sans résistance de l'air).
← Chapitre 2 : Cinématique du point matériel | Chapitre 4 : Energie mécanique du point matériel →
Ces cours fait partie de la série Mécanique Générale 1.



