

Outils Mathématiques :
Les Vecteurs
La pierre angulaire de toute la mécanique — comprendre les vecteurs, c'est comprendre comment le monde physique se calcule.

1. Pourquoi les vecteurs en mécanique ?
Imaginez que vous poussez une caisse sur un sol. Dire simplement « je pousse avec 50 Newton » est insuffisant : votre interlocuteur ne sait pas si la caisse va avancer tout droit, partir de côté, ou s'enfoncer dans le sol. Il manque la direction et le sens de l'effort.
C'est exactement là qu'intervient le concept de vecteur. En mécanique générale, la quasi-totalité des grandeurs physiques — forces, vitesses, accélérations, moments — sont des grandeurs vectorielles. Maîtriser les vecteurs, c'est poser les fondations sur lesquelles repose tout le reste du cours.
2. Définition et caractéristiques d'un vecteur
Un vecteur est une grandeur mathématique qui ne peut pas être entièrement décrite par un simple nombre. Il est défini par quatre caractéristiques indissociables :
| Caractéristique | Signification | Exemple (Force) |
|---|---|---|
| Point d'application | Là où le vecteur agit | Le point de contact main–caisse |
| Direction | La droite support du vecteur | L'axe horizontal |
| Sens | L'orientation sur la direction | Vers la droite (+x) |
| Norme (module) | L'intensité, toujours ≥ 0 | 50 Newton |
Un vecteur est noté avec une flèche au-dessus : ū, F⃗, v⃗. Sa norme s'écrit ‖ū‖ ou |ū|.
Vecteur unitaire
Un vecteur unitaire a une norme égale à 1. Pour normaliser un vecteur quelconque ū, on le divise par sa propre norme :
Ce vecteur unitaire indique uniquement la direction et le sens de ū, sans son intensité.
3. Types de vecteurs en mécanique
Tous les vecteurs ne se comportent pas de la même façon selon le contexte. On distingue trois catégories, souvent confondues dans les cours classiques :
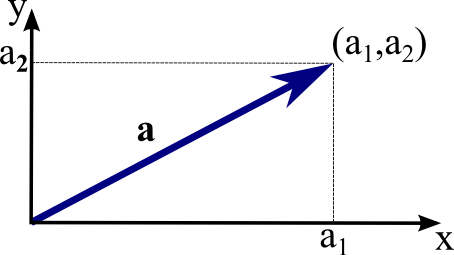
4. Base orthonormée et repère cartésien
Pour exprimer quantitativement un vecteur, il faut le projeter dans un repère de référence. Le repère cartésien orthonormé (repère de Descartes) est le plus utilisé en mécanique.
La base canonique de ℝ³
Elle est constituée de trois vecteurs unitaires mutuellement perpendiculaires :
⃗j = (0, 1, 0) // axe y → direction profondeur
⃗k = (0, 0, 1) // axe z → direction verticale
Tout vecteur de l'espace s'écrit comme une combinaison linéaire de ces trois vecteurs :

Propriétés de la base orthonormée
| Produit | Résultat | Interprétation |
|---|---|---|
| ⃗i·⃗i = ⃗j·⃗j = ⃗k·⃗k | 1 | Vecteurs de norme 1 |
| ⃗i·⃗j = ⃗i·⃗k = ⃗j·⃗k | 0 | Vecteurs orthogonaux |
| ⃗i ∧ ⃗j | ⃗k | Règle du trièdre direct |
| ⃗j ∧ ⃗k | ⃗i | Permutation cyclique |
| ⃗k ∧ ⃗i | ⃗j | Permutation cyclique |
La base est dite directe (règle de la main droite) : si vous pointez les doigts de la main droite de ⃗i vers ⃗j, votre pouce pointe dans la direction ⃗k. Ce choix conditionne le signe du produit vectoriel.
5. Opérations fondamentales sur les vecteurs
5.1 Addition et soustraction
L'addition se fait composante par composante. Géométriquement, c'est la règle du parallélogramme :
ū + v̄ = (3+1, -1+4, 2-3) = (4, 3, -1)
ū - v̄ = (3-1, -1-4, 2+3) = (2, -5, 5)
5.2 Multiplication par un scalaire
Multiplier par λ ∈ ℝ multiplie chaque composante par λ. Si λ < 0, le sens est inversé :
6. Produit scalaire
Le produit scalaire prend deux vecteurs et retourne un nombre réel. Il mesure à quel point deux vecteurs « pointent dans la même direction ».
ū · v̄ = ‖ū‖ · ‖v̄‖ · cos(θ)
// Définition algébrique (composantes)
ū · v̄ = uxvx + uyvy + uzvz
ū · v̄ = 0 ⟺ ū ⊥ v̄
Soient F⃗₁ = (2, 1, -1) N et F⃗₂ = (0, 3, 2) N. Calculer l'angle entre ces forces.
‖F₁‖ = √(4+1+1) = √6 ≈ 2.449 N
‖F₂‖ = √(0+9+4) = √13 ≈ 3.606 N
cos(θ) = 1 / (√6·√13) = 1/√78 ≈ 0.1133
θ = arccos(0.1133) ≈ 83.5°

7. Produit vectoriel
Le produit vectoriel de deux vecteurs donne un nouveau vecteur perpendiculaire au plan formé par les deux vecteurs d'entrée. Il est fondamental pour calculer les moments de force, les vitesses de rotation, et la force de Coriolis.
|ux uy uz|
|vx vy vz|
= (uyvz-uzvy)⃗i - (uxvz-uzvx)⃗j + (uxvy-uyvx)⃗k
‖ū ∧ v̄‖ = ‖ū‖ · ‖v̄‖ · |sin(θ)|
L'ordre des facteurs change le sens du résultat. En mécanique, on calcule toujours M⃗ = OA⃗ ∧ F⃗ et non F⃗ ∧ OA⃗.
Bras de levier OA⃗ = (0.3, 0, 0) m, force F⃗ = (0, 50, 0) N appliquée en A.
= |⃗i ⃗j ⃗k |
|0.3 0 0 |
|0 50 0 |
= ⃗i(0·0-0·50) - ⃗j(0.3·0-0·0) + ⃗k(0.3·50-0·0)
= (0, 0, 15) N·m
→ Moment de 15 N·m autour de l'axe z (sortant du plan)
8. Implémentation MATLAB
MATLAB est l'outil de référence pour les calculs vectoriels en ingénierie. Voici les commandes essentielles du cours.
8.1 Déclaration et opérations de base
%% ── Déclaration de vecteurs ──────────────────────────
u = [3, -1, 2]; % vecteur ligne
v = [1, 4, -3];
%% ── Norme ────────────────────────────────────────────
norme_u = norm(u); % √14 ≈ 3.742
%% ── Vecteur unitaire ─────────────────────────────────
u_hat = u / norm(u);
%% ── Addition / Soustraction ──────────────────────────
somme = u + v; % [4, 3, -1]
diff = u - v; % [2, -5, 5]
fprintf('Norme de u : %.4f\n', norme_u);
fprintf('u + v = [%g, %g, %g]\n', somme(1), somme(2), somme(3));8.2 Produit scalaire et angle
F1 = [2, 1, -1];
F2 = [0, 3, 2];
%% Produit scalaire
ps = dot(F1, F2); % = 1
%% Angle entre les vecteurs
theta_rad = acos(dot(F1,F2) / (norm(F1)*norm(F2)));
theta_deg = rad2deg(theta_rad); % ≈ 83.5°
fprintf('Angle entre F1 et F2 : %.2f deg\n', theta_deg);
%% Test d'orthogonalité
if abs(ps) < 1e-10
disp('Les vecteurs sont orthogonaux');
end8.3 Produit vectoriel et moment
r = [0.3, 0, 0]; % bras de levier OA (m)
F = [0, 50, 0]; % force appliquée (N)
M = cross(r, F); % → [0, 0, 15] N·m
fprintf('Moment M = [%.2f, %.2f, %.2f] N.m\n', M(1),M(2),M(3));
%% Vérification anti-commutativité
M2 = cross(F, r); % → [0, 0, -15] : signe opposé !
disp('cross(r,F) ='); disp(M);
disp('cross(F,r) ='); disp(M2);8.4 Visualisation 3D des vecteurs
u = [2, 3, 1];
v = [1, 0, 2];
pv = cross(u, v); % produit vectoriel
figure; hold on;
quiver3(0,0,0, u(1),u(2),u(3), 'r', 'LineWidth', 2);
quiver3(0,0,0, v(1),v(2),v(3), 'b', 'LineWidth', 2);
quiver3(0,0,0, pv(1),pv(2),pv(3), 'g', 'LineWidth', 2);
legend('u', 'v', 'u∧v');
xlabel('x'); ylabel('y'); zlabel('z');
grid on; view(3);
title('Vecteurs u, v et leur produit vectoriel');9. Exercice d'application corrigé
Voici un exercice intégrateur qui synthétise toutes les notions de ce chapitre.
On applique deux forces en un point O d'une structure :
F⃗₁ = (4, 2, -3) N et F⃗₂ = (-1, 5, 2) N
Questions : (a) Résultante R⃗ = F⃗₁ + F⃗₂ | (b) Norme de R⃗ | (c) Angle entre F⃗₁ et F⃗₂ | (d) F⃗₁ ∧ F⃗₂
R⃗ = (4-1, 2+5, -3+2) = (3, 7, -1) N
b) Norme :
‖R⃗‖ = √(9+49+1) = √59 ≈ 7.68 N
c) Produit scalaire :
F₁·F₂ = (4)(-1)+(2)(5)+(-3)(2) = -4+10-6 = 0
cos(θ) = 0 → θ = 90° → Forces PERPENDICULAIRES !
d) Produit vectoriel :
F₁⃗ ∧ F₂⃗ = ( (2)(2)-(-3)(5), (-3)(-1)-(4)(2), (4)(5)-(2)(-1) )
= ( 4+15, 3-8, 20+2 ) = (19, -5, 22)
F1 = [4, 2, -3];
F2 = [-1, 5, 2];
% a) Résultante
R = F1 + F2;
fprintf('R = [%g %g %g] N\n', R);
% b) Norme
fprintf('||R|| = %.4f N\n', norm(R));
% c) Angle
ps = dot(F1, F2);
theta = rad2deg(acos(ps/(norm(F1)*norm(F2))));
fprintf('Angle = %.2f deg\n', theta); % → 90.00°
% d) Produit vectoriel
pv = cross(F1, F2);
fprintf('F1^F2 = [%g %g %g]\n', pv);10. Synthèse et points-clés à retenir
Ce premier chapitre est dense, mais ces outils seront utilisés à chaque séance de mécanique. Voici le tableau de synthèse à garder sous la main :
| Notion | Ce qu'elle retourne | Commande MATLAB |
|---|---|---|
| Norme | Scalaire ≥ 0 | norm(u) |
| Vecteur unitaire | Vecteur de norme 1 | u/norm(u) |
| Addition | Vecteur | u + v |
| Produit scalaire | Scalaire → angle, orthogonalité | dot(u,v) |
| Produit vectoriel | Vecteur ⊥ au plan (u,v) | cross(u,v) |



